Issued by

The new Shepherd (NS) booster will land after the fifth flight of this vehicle on NS-11 May 2, 2019. Credit: Blue look
Some of the most interesting places to read in our solar system are found in very hospitable environments – but landing on any planetary body is already a dangerous concept. With NASA Planning robot and crew passengers to new locations on the moon Tuesday, Avoiding landing on the steep slope of a ravine or on a rocky field helps ensure safe touch to the surface exploration of other worlds. To improve landing safety, NASA is developing and testing a set of precise landing and risk-avoidance technologies.
The combination of laser sensors, a camera, high-speed computer and sophisticated algorithms will give the spacecraft the ability to detect a designated landing area, detect potential hazards, and adjust the trajectory to a safe touchdown base. Safe and Accurate Landing within the Space Technology Mission Directorate’s Game Transformation Development Program – Technologies developed under the Integrated Skills Evolution (SPLICE) program will eventually enable spacecraft to avoid boulders, craters, and more into landing areas. The football field is already targeted as relatively safe.
Safe and Accurate Landing – A new set of lunar landing technologies called Integrated Skills Evolution (SPLICE) will enable safer and more accurate lunar landings than ever before. Future lunar missions could use NASA’s advanced SPLICE algorithms and sensors to target impossible landing sites during Apollo missions, such as dangerous boulders and nearby shady craters. SPLICE technologies will help land humans on Mars. Credit: NASA
The blue look will feature the first integrated test aircraft on the new Shepherd rocket during the upcoming mission of three of SPLICE’s four major substructure. When the rocket’s booster returns to the ground, after reaching the boundary between the Earth’s atmosphere and space, SPLICE’s terrestrial relative navigation, navigation Doppler lite and descent and landing system run on the booster. They act as each approaches the surface of the moon.
The fourth largest SPLICE component, the Risk Detection Litter, will be tested by ground and aircraft tests in the future.
Dipped in breadcrumbs
Once a site has been selected for the study, part of the consideration is to ensure adequate space for a spacecraft to land. The size of the area, known as the landing ellipse, reveals the inaccuracy of conventional landing technology. The target landing area for Apollo 11 in 1968 was about 11 miles 3 miles, and the astronauts piloted the lander. Subsequent robotic missions to Mars were designed for autonomous landings. The Vikings arrived on the Red Planet after 10 years with a target ellipse of 174 miles by 62 miles.
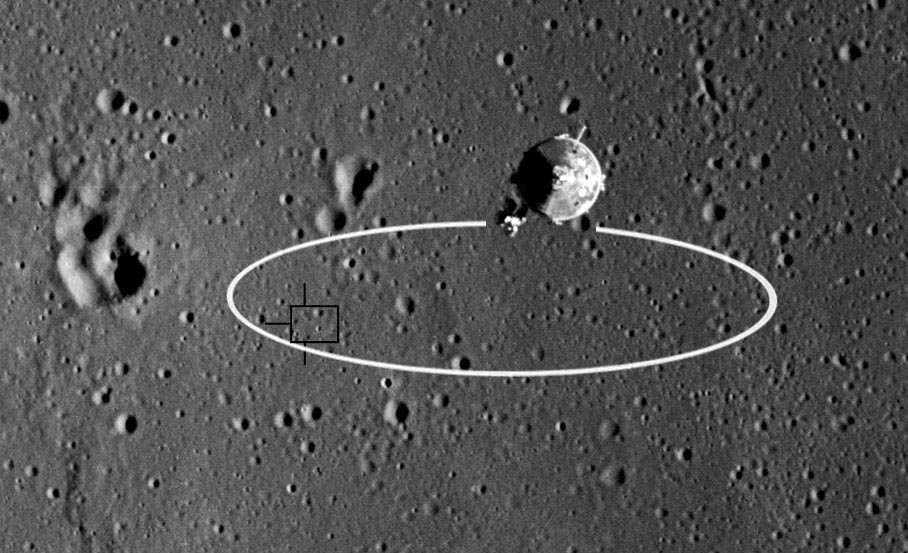
The Apollo 11 landing ellipse shown here is 11 miles 3 miles. Precise landing technology will greatly reduce the landing area and allow multiple trips to land in the same region. Credit: NASA
As technology improved, the size of successive autonomous landing zones decreased. In 2012, the Curiosity Rover landing ellipse was reduced from 12 miles to 4 miles.
Pointing to a landing site can help future expeditions target areas for new scientific research in areas that were considered the most dangerous before the untargeted landing. This will enable advanced delivery operations to deliver cargo and goods in one place, without spreading over miles.
Each planetary body has its own unique conditions. That’s why SPLICE is “designed to integrate any spacecraft that lands on a planet or moon,” said project manager Ron Sostarik. Based on NASA’s Johnson Space Center in Houston, Zostaric explained that the project has multiple centers throughout the company.
Topographic relative navigation provides navigation measurement by comparing real-time images with maps of known surface features during descent. Credit: NASA
“What we are building is a complete descent and landing system that will work for future Artemis missions to the moon and be suitable for Mars,” he said. “Our job is to put the individual components together and make sure it functions as a functional organization.”
Atmospheric conditions may vary, but the landing and landing process is the same. The SPLICE system is designed to enable terrain relative navigation several miles from the ground. The inner camera captures the surface, taking up to 10 pictures per second. They are constantly injected into the computer, which are pre-loaded with a database of satellite images and known identities of the landing field.
The algorithms to determine the location of the spacecraft and navigate safely to its expected landing site are looking for real-time images for known features. This is similar to going through signs like buildings, rather than street names.
In the same way, a terrestrial relative navigation spacecraft locates and sends that information to the navigation and control system, which is responsible for directing the flight path to the surface. The computer almost knows when the spacecraft will reach its destination, almost like dipping in breadcrumbs and following them to the final destination.
This process continues for about four miles from the surface.
Laser navigation
Knowing the exact position of the spacecraft is essential for the calculations required to plan and execute the running descent for an accurate landing. Beyond the descent, the computer navigation Doppler lid measures the speed and range measurements of the drive, which further adds accurate navigation information coming from the terrain relative navigation. Lidar (light detection and range) acts like a radar, but uses light waves instead of radio waves. Three laser beams, each as narrow as a pencil, point toward the ground. The light from these beams bounces off the surface and reflects back towards the spacecraft.
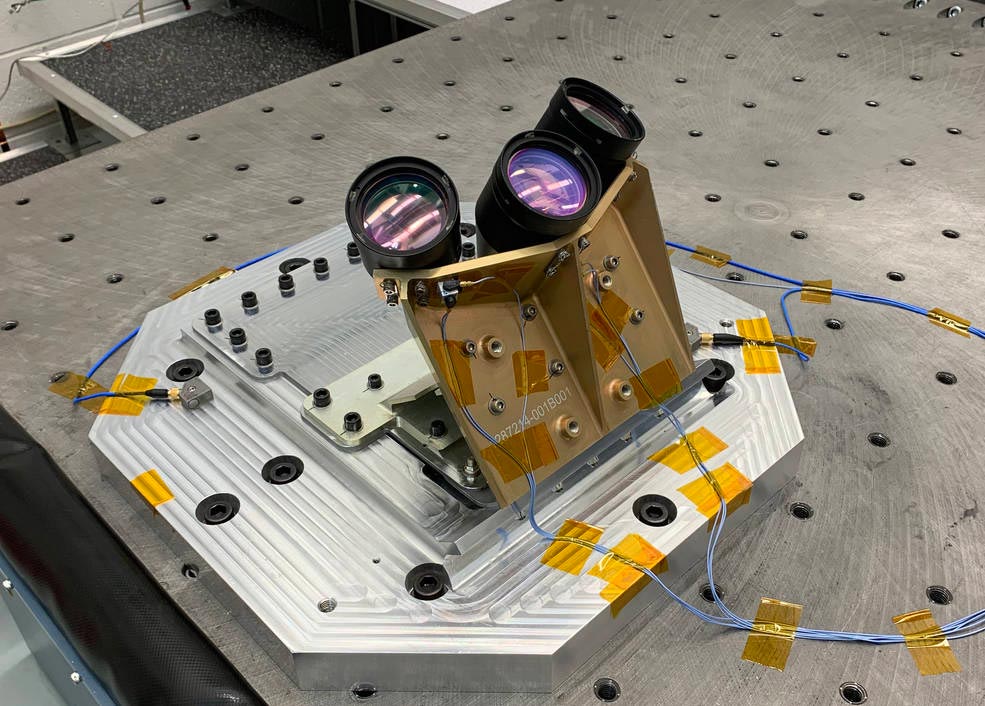
NASA’s navigation Doppler lite instrument includes a chassis, which contains electro-optic and electronic components, and an optical head with three telescopes. Credit: NASA
The travel time and wavelength of that reflected light are used to calculate how far, in what direction, and how fast the craft is moving from the ground. These calculations are performed 20 times per second for three laser beams and fed into a guiding machine.
Doppler litter operates successfully on Earth. However, Forsyth, co-inventor and primary investigator of technology at NASA’s Langley Research Center in Hampton, Virginia, is responsible for meeting the challenges of using it in space.
“There is still little known about how much signal is coming from the surface of the moon and Mars,” he said. If the material on the ground is not very reflective, the signal to the sensors will be weak. But Amzardian believes that the lidar performs better than radar technology because it orders larger quantities than laser frequency radio waves, which enables much higher precision and efficient sensing.
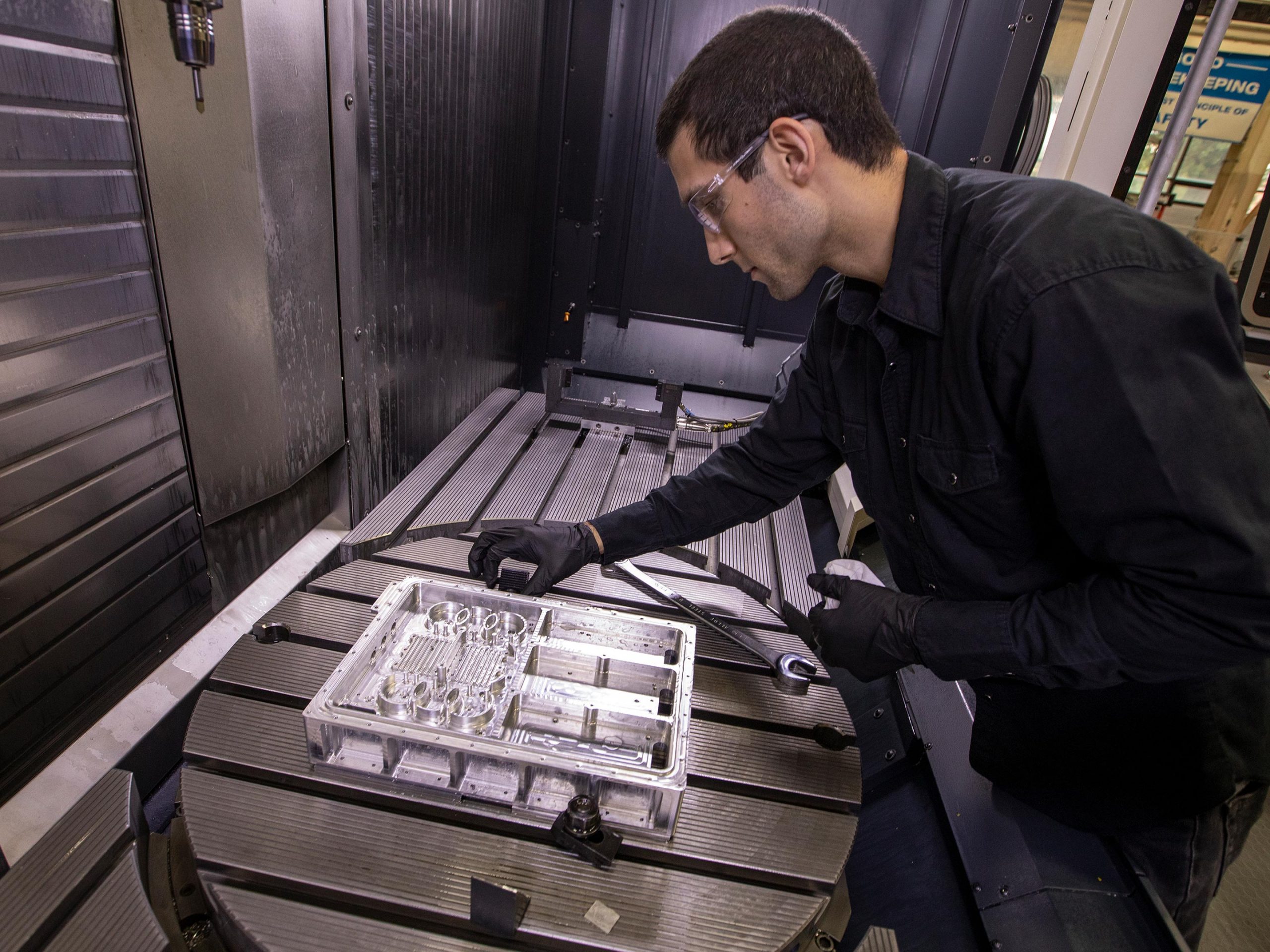
Langley engineer John Savage inspects the navigation Doppler lid unit after it has been fabricated. Credit: NASA / David C. Bowman
The descent and landing system is responsible for managing all of this data. Navigation data from sensor systems is fed to internal algorithms, which calculate new paths for accurate landing.
Computer Powerhouse
Synchronize and landing system Synchronizes the functions and data management of individual SPLICE components. It must integrate seamlessly with other systems on any spacecraft. Therefore, this small computing powerhouse precision landing technologies prevents the primary aircraft system from being overloaded.
The calculation requirements initially identified made it clear that the existing computers were not adequate. NASA’s high-performance spaceflight will meet the needs of the computer processor, but will still take many years. SPLICE with Blue Origin on its new Shepherd rocket needed an interim solution ready for its first auxiliary rocket flight test. Data from the performance of the new system will help shape the transition to its end.
The SPLICE hardware is subject to products for vacuum chamber testing. Three of SPLICE’s four major subsidiaries will feature the first integrated test aircraft on the Blue Origin’s new Shepherd rocket. Credit: NASA
John Carson, Technical Integration Manager for Precision Landing, said, “Substitute computer has a very similar processing technology that represents both future high-speed computer design and future descent and landing system integration efforts.”
In anticipation, such test missions will enable NASA and commercial providers to design safe landing systems on the lunar surface and other solar systems.
“Getting into another world safely and accurately still has many challenges,” Carson said. “There is no business technology you can go out and buy yet. Every future surface mission can use this precise landing capability, so NASA meeting is needed now. We are promoting exchange and application with our industry partners.”

“Food expert. Unapologetic bacon maven. Beer enthusiast. Pop cultureaholic. General travel scholar. Total internet buff.”
